Installing gazebo_ros_pkgs
Gazebo和ROS的接口协议包含在一个叫做'gazebo_ros_pkgs'的新的包中,可以见上一章。
这些指令是为了让Gazebo的版本和ROS完全兼容。建议先阅读"Which combination of ROS/Gazebo version to use"(当然我没看,用的是kinetic-full 版本中自带的gazebo-7.0.0)
准备工作
理解ROS的基本概念,过了一遍ROS的教程。
安装ROS
安装full版本的万事大吉。
安装gazebo
可以直接安装也可以安装预编译的版本。
测试独立版本的Gazebo
在安装gazebo_ros_pkgs之前先看看环境中是不是已经装了gazebo
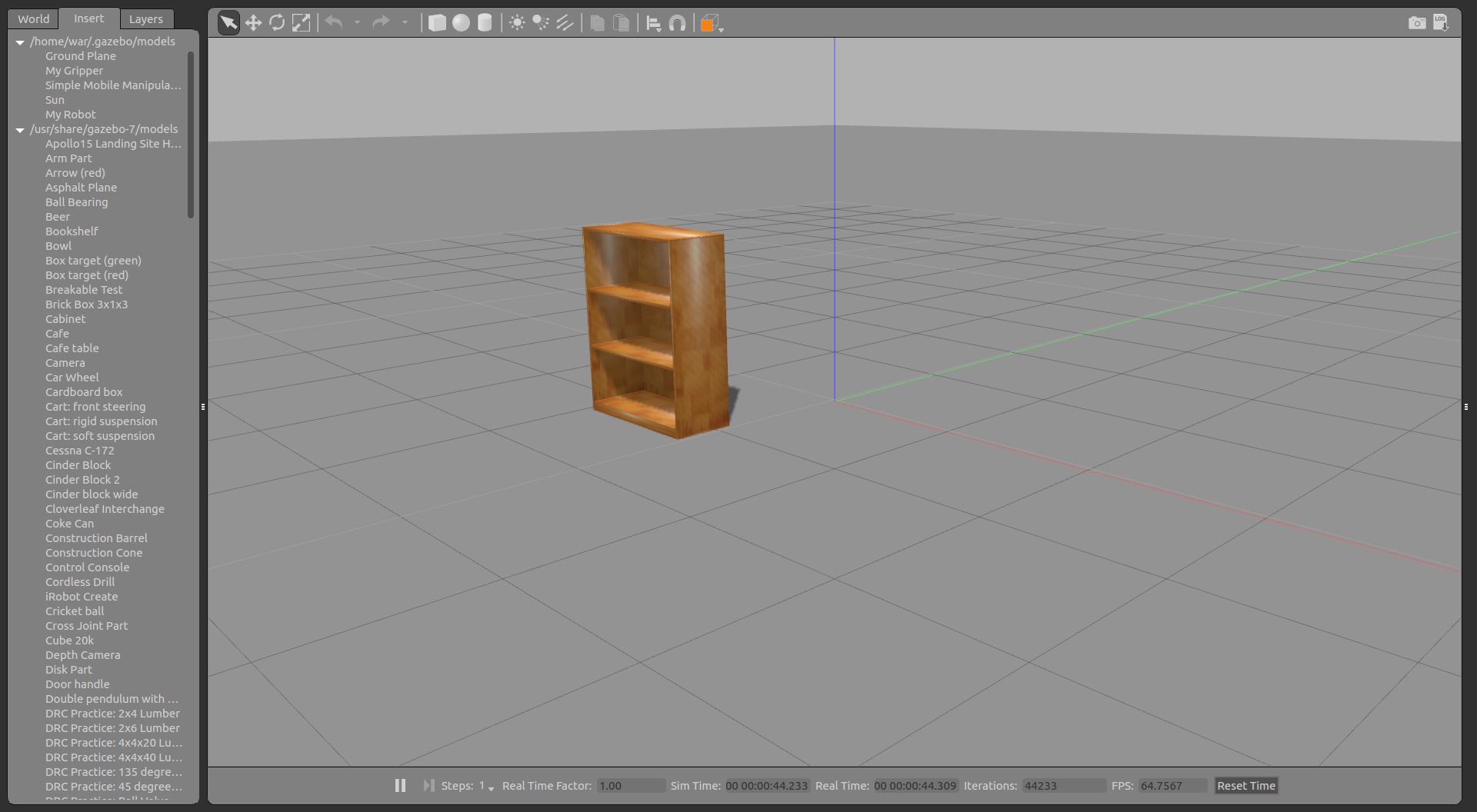
应该能看见一个GUI包含一个空的gazebo世界。可以尝试在空的世界中插入一些简单的模型(可以用online的素材,也可以自己下载保存到本地的指定路径).
####测试你的gazebo的版本是否正确
查看gazebo是否安装在正确的路径里。
```which gzserver
which gzclient
 我使用预编译版的没有用源代码安装,路径如上所示,如果是源码安装的路径应该是
我使用预编译版的没有用源代码安装,路径如上所示,如果是源码安装的路径应该是
```/usr/local/bin/gzclient
安装gazebo_ros_pkgs
A. 安装预编译版的
http://wiki.ros.org/ros_control
sudo apt-get install ros-XXX(ros-version)-gazebo-ros-pkgs
Indigo之前的版本好像还要安装 ros-xxx-gazebo-ros-control
如果安装成功,直接看下一章。
B. 源码安装
如果没有git 先安装git,
sudo apt-get install git
过程有点复杂...我没仔细看,大家可以参考原文:
http://gazebosim.org/tutorials?tut=ros_installing&cat=connect_ros
测试gazebo和ROS的接口
确保你每次都source了ros的bash,或者将ROS的bash写到~/.bashrc中。
保证在~/.bashrc中写入了ROS和个人工程(catkin_ws)的setup.bash
roscore&rosrun gazebo_ros gazebo
然后应该在Gazebo的GUI中看到一个空的世界。
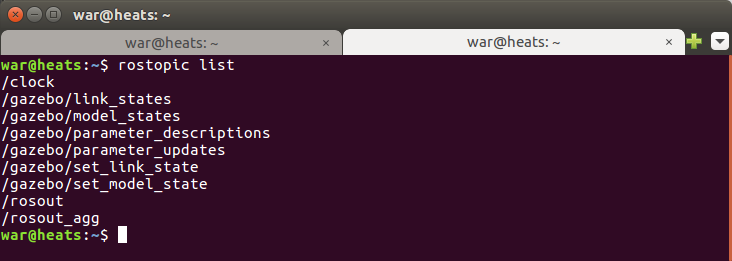
确认合适的ROS连接已经被建立,查看当前可用的ROS的话题:
rostopic list
应该能看到有如下这些topic:
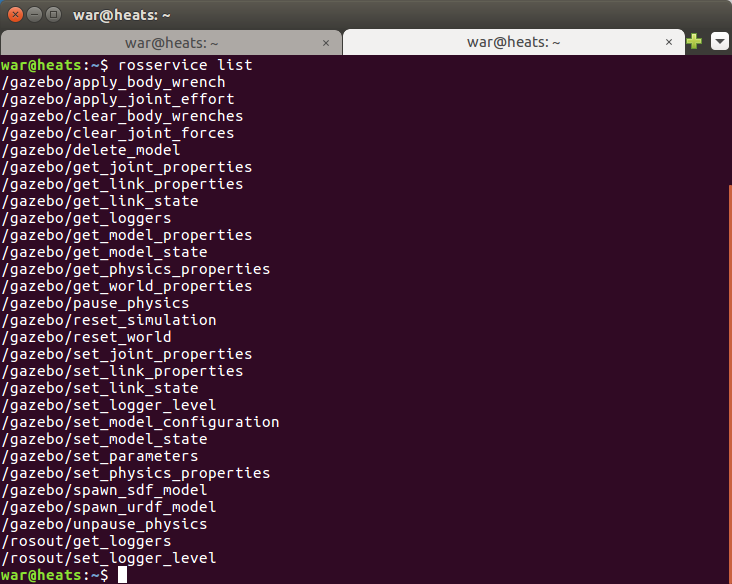
同样可以确定Gazebo提供的service存在:
其他的一些启动Gazebo的方式
同时启动server和client
rosrun gazebo_ros gazebo只启动服务端的gazebo
rosrun gazebo_ros gzserver只启动客户端的gazebo
rosrun gazebo_ros gzclient带调试模式启动gazebo的服务端
rosrun gazebo_ros debug用roslaunch启动Gazebo
roslaunch gazebo_ros empty_world.launch